机器人ROS系统服务 探索“乌龟”背后的关键技术
随着机器人技术的快速发展,ROS(Robot Operating System)作为开源机器人操作系统已成为行业标准。其中经典的“ROS乌龟”仿真案例不仅帮助初学者入门,更揭示了机器人系统的核心服务架构。
一、ROS系统基础架构
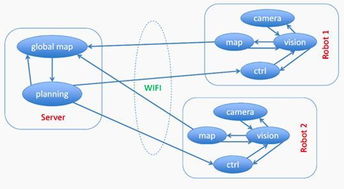
ROS采用分布式计算框架,通过节点(Nodes)实现功能模块化。每个节点可独立运行,通过话题(Topics)、服务(Services)和动作(Actions)进行通信。这种设计使系统具备高度可扩展性和容错能力。
二、乌龟仿真的技术内涵
经典的turtlesim仿真器看似简单,实则包含了完整的ROS系统元素:
- 节点管理:/turtlesim节点负责可视化,/teleop_turtle节点处理控制
- 消息传递:通过/turtle1/cmd_vel话题传递速度指令
- 坐标变换:实时维护乌龟在世界坐标系中的位姿
三、核心系统服务详解
- 参数服务器:集中管理配置参数,支持动态调整
- 消息记录与回放:rosbag工具实现数据采集与复现
- 设备驱动服务:标准化硬件接口抽象
- 坐标变换服务:tf2库维护复杂的坐标关系树
- 行为管理服务:通过actionlib实现长时任务控制
四、实际应用场景
这些系统服务在真实机器人中发挥着关键作用:
- 工业机器人通过坐标变换实现精确运动控制
- 服务机器人利用行为管理完成复杂任务序列
- 自动驾驶系统依赖消息记录进行算法验证
五、发展趋势
新一代ROS2采用DDS通信中间件,在实时性、安全性和跨平台能力上实现重大突破,为机器人系统服务带来更强大的支撑。
从简单的“ROS乌龟”到复杂的机器人系统,这些基础服务构成了机器人技术的坚实底座。深入理解这些“龟”们背后的系统服务,是开发高性能机器人应用的关键所在。
如若转载,请注明出处:http://www.hubangkj.com/product/9.html
更新时间:2026-06-19 22:11:30